What must it look like?
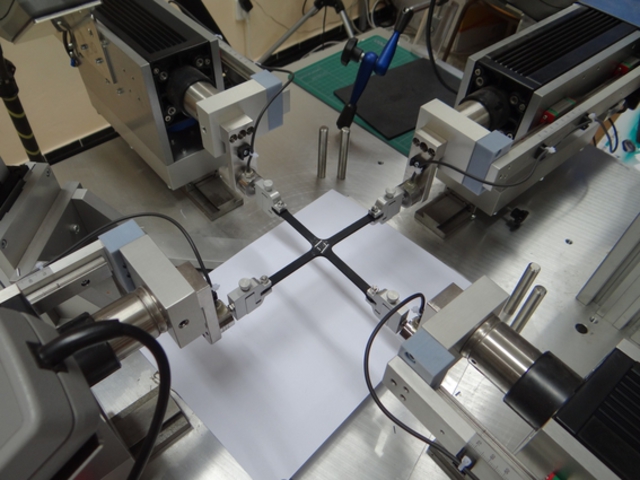
Figure 1 - A biaxial tensile test machine
(http://www.biomechanika.cz/pictures/494.jpeg)
It has to look something like that thing I posted above in Figure 1. Of course our design will be significantly different. We do not have a bunch of money to work with. If anything, we have almost no money to work with. Luckily the other student was able to buy many of the necessary parts beforehand with some funding he had acquired.
What do we have?
We have a frame made out of aluminum extrusion, four linear actuators (which may or may not all be operational), an arduino, two load cells, and a whole lot of frustration. Just kidding about that last part.
The frame is good to go. The connections between the linear actuators, load cells, and grips are pretty much good to go (for now). We'll see how they do when everything is actually together. The camera is operational.
The next step is to achieve controlled movement out of the actuators. We have been on this step for a little while now. What we were doing was using a Robot Power MultiMoto shield on the Arduino and were trying to power the actuators with that. According to the specs, that should totally get the job done. But when powering the combination of actuators, shield, and arduino, something went wrong. I wasn't personally there, but the arduino was fried. The motor shield also seems to have been fried because it wouldn't do anything when I tried using it with my own Arduino Uno (which is still perfectly operational).
After that, I tried getting the actuators just to work with any power supply. Three out of four at least moved slowly when I attached them (individually) to a 9 V, 1 A power supply. The actuators call for 12 V and from 1 A up to 6 A of current. The fourth one didn't really do anything. I took it up to the electrical engineering department so someone more knowledgeable could help me out. Apparently the actuator had some less amount of resistance through its wiring. I'm not sure why that is. According to Ohm's law, though, having less resistance throughout the actuator would result in a larger current running through the motor when supplied 12 V. So I attached it to my car battery for a second and got it moving. Was that smart? I don't know. It moved though, and was not pushed past its current and voltage limits (according to my math).
Will the differences in internal resistance cause some sort of problem? Will I need to incorporate some sort of feedback control? Hmmmm. That could pose problematic, as I have very limited experience with that.
So where are we at? The MultiMoto is being returned to the company with a new one on the way. In the meantime, I need to get two of the actuators working and controlled. I want to see some tensile test action. I also need to power these.
ToDo:
- Find or buy appropriate power supply
- Buy a motor shield to power two of the actuators
- Determine whether or not we actually need feedback control
- Drink coffee
In addition to that, I need to help get the load cells working. The load cell does not supply a significant enough voltage to be read by the DAQ. Therefore, we wish to use an op-amp (operational amplifier) to amplify our signal enough to be read. Apparently I had already been introduced to this in some class in the past, as I remembered a few things about it. But nah, I'm pretty clueless still.
Which op-amp should we use? How do we wire everything? I need to make these schematics and decisions. I gotta get this stuff workinggggg.
ToDo:
- Determine how much amplification we need.
- Buy appropriate op-amps, resistors, and other electrical components.
At the end of this, I am hoping to be reimbursed as well. There's really no telling what will happen. I guess if I land a decent job after all this, losing a hundred bucks won't be such a big deal at all. I'm sure it'll all be good in the end.
No comments:
Post a Comment