One aspect of this test includes o-rings. Page 109 of this reference gives me some baseline to go off of for my o-ring groove dimensions. I'll be using a 2 mm thick o-ring, just because it looks like a good size.
Thursday, February 23, 2017
Bulge test dimensioning
The bulge test parts must be made. The idea for this is that a nitrogen tank will supply nitrogen at incremental pressures to a thin foil until it bulges and breaks. In order for this to work, a fixture is needed to hold the foil in place and apply pressure.
Wednesday, February 22, 2017
Feel the power
My power supply came in the mail, yay! I ended up buying this one. If it performs as advertised, it should give us 12V up to 30A. Cool! It should work well. I still need to figure out how to wire up everything though. I have a wall plug that I cut open, but I haven't figured out which wire should go into which port.
This website might help determine what each wire should be attached to (wall to power supply). (EDIT: The European wiring worked! Green/yellow ground, blue neutral, brown line)
How to wire a DPDT instructables looks good enough in teaching me how to wire up the DPDT switch I bought last week. By the looks of it, I may need to do a little bit more shopping for some electrical connections and possibly a crimping tool. All I need is to get this thing moving. After it moves, we may run into more issues. (Yay)
If you are reading this, you may have by now figured out that I am just using this as a place to drop a bunch of links for my own future reference. My plan is working out perfectly! hahahahahaha
This website might help determine what each wire should be attached to (wall to power supply). (EDIT: The European wiring worked! Green/yellow ground, blue neutral, brown line)
How to wire a DPDT instructables looks good enough in teaching me how to wire up the DPDT switch I bought last week. By the looks of it, I may need to do a little bit more shopping for some electrical connections and possibly a crimping tool. All I need is to get this thing moving. After it moves, we may run into more issues. (Yay)
If you are reading this, you may have by now figured out that I am just using this as a place to drop a bunch of links for my own future reference. My plan is working out perfectly! hahahahahaha
Thursday, February 16, 2017
Switching things up
Frustration was the word of the day yesterday. I guess frustration stemming from inexperience. The motor shield appeared to be in place to be usable, and it actually worked for a little bit of the time, but that was until it all kind of went wrong.
Some of my soldering came loose on the big motor/power attachment pins, which prompted a re-solder. I'm not the one who performed the re-solder, and I have a feeling like that might have messed things up a bit. I tried hooking up the power to the shield again, and the current was quite high. The voltage was low because of the high current draw. Yeah, things did not end well... I knew that because of the large spark that was momentarily about the size of a quarter. Gah. Frustrating.
While I am able to get the Pololu shield working, it requires very careful soldering. Long story short, I am not willing to put that level of care into it at this point in time. We are going to buy a power supply and connect the motors with some switches.
Three switches will be used: one to switch on/off the x-axis, one to switch on/off the y-axis, and one as a master switch. The master switch is a DPDT center-off switch. This allows for both reverse and forward direction. The only concern is that we won't really be able to control the speed of the actuators. Maybe a rheostat could be used for that?
So yeah, that's where we are with that situation. I have wire and three switches from RadioShack. The store ended up being in a "going-out-of-business" state, so I got all three switches for around $6. Sweet!
Each switch is rated for 12 Volts and 25 Amps (or something like that). Now I just need a power supply that can give us exactly what we need. 12 Volts. From what I understand, a power supply amperage rating does not indicate that it will actually give max power all the time. If it is rated for 20A, it has the ability to supply 20A of current, but will only supply whatever amount the load requires.
Some of my soldering came loose on the big motor/power attachment pins, which prompted a re-solder. I'm not the one who performed the re-solder, and I have a feeling like that might have messed things up a bit. I tried hooking up the power to the shield again, and the current was quite high. The voltage was low because of the high current draw. Yeah, things did not end well... I knew that because of the large spark that was momentarily about the size of a quarter. Gah. Frustrating.
While I am able to get the Pololu shield working, it requires very careful soldering. Long story short, I am not willing to put that level of care into it at this point in time. We are going to buy a power supply and connect the motors with some switches.
Three switches will be used: one to switch on/off the x-axis, one to switch on/off the y-axis, and one as a master switch. The master switch is a DPDT center-off switch. This allows for both reverse and forward direction. The only concern is that we won't really be able to control the speed of the actuators. Maybe a rheostat could be used for that?
So yeah, that's where we are with that situation. I have wire and three switches from RadioShack. The store ended up being in a "going-out-of-business" state, so I got all three switches for around $6. Sweet!
Each switch is rated for 12 Volts and 25 Amps (or something like that). Now I just need a power supply that can give us exactly what we need. 12 Volts. From what I understand, a power supply amperage rating does not indicate that it will actually give max power all the time. If it is rated for 20A, it has the ability to supply 20A of current, but will only supply whatever amount the load requires.
Tuesday, February 14, 2017
Soldering the Pololu shield
Today has absolutely flown by. After figuring out how to transport my roommates soldering stuff to the engineering building, I had to get my confidence sufficiently up to complete the job. So what did I do? I just kind of jumped into it.






Figure 1: Soldering setup
I had a nice little setup in the lab, as can be seen in Figure 1. A slightly wet sponge, a heating up soldering iron, and shaky hands.

Figure 2: not the prettiest job
I'll be the first to admit that my solder job doesn't look the best. I tried this alignment technique using the Arduino pins themselves, but I think the pins are misaligned by a little bit, so my solder job went a bit misaligned. That is just for two rows of pins though, as seen in Figure 2. Two other rows came out totally fine. Even the jumper pins and motor/power junctions came out decently well.

Figure 3: Oh babyyyy
Figure 3 shows the underside of this motor shield. It's the result of my first time soldering. Happy days! Next up I'll have to find out if it actually works as it's supposed to work. I really hope it does. Maybe I'll hook up a low power DC motor I have first to make sure it actually works, and then I'll hook up the big-boy actuators.
I hope I didn't burn anything..
Here are a few more pics of the shield attached to the Arduino.


Monday, February 13, 2017
Psyching myself up to solder
Oh boy, the Pololu motor shield came in! It came in yesterday, actually, and it's smaller than I thought it would be. I'm going to have to learn how to solder now. I mean, I could probably do it ok, but I need to make sure that I don't mess anything up. I want it to be operational as soon as possible.
So with that being said, I've been watching some videos that involve soldering or teach how to solder.
So with that being said, I've been watching some videos that involve soldering or teach how to solder.
Video 1 - A shield being soldered for Arduino
Video 1 shows the first video that I've watched. It's just a guy soldering stuff. I'm anticipating mine to work a bit differently, though, because I have pins that have inserts for 22 AWG wire at the top. Hmm.
Video 2 - Soldering for beginners
Video 2 gave me some good hints on how to solder. Since I'll be soldering small components on a board, I will have to keep the temperature on the low side (600 degrees Fahrenheit or 315 degrees Celsius).
Steps I've noticed:
- Clean off connections and soldering iron.
- A wet sponge can help for cleaning off the iron.
- Apply some solder to the tip of the iron first.
- Heat up the metal that you want to solder.
- Apply solder to the heated metal (and not the iron tip).
- This is because there is flux in the solder which helps make the connection.
- Quickly pull up the iron to get that nice bubble look
- Don't heat the board for too long.
I think I can do this! I'm just somewhat worried about the size of the soldering iron tip. My roommate has an iron, but the tip is quite large. I have an iron too, but it has no way to control temperature. I can find out if the engineering building here has an iron for me to use.
Video 3 - More soldering!
Ok, by the ending of Video 3, I feel pretty good about the steps. I should practice on some cheaper items first, though. Cool cool. I will tackle this issue tomorrow when I have free time.
Thursday, February 9, 2017
Specs: Arduino motor shields
It's all fine and dandy that we have some linear actuators in our possession, but moving them is another issue. We need to control the speed at which they move outward, along with some sort of initialization logic. The actuators need to all start with the grip ends at the needed locations, followed by being retracted, causing the tension that we are looking for.



In order to control the movement, we are using an Arduino Uno with a motor shield. The particular motor shield that we are hoping to use is the Robot Power MultiMoto. It appears to be perfect for our needs.

Figure 1 - Robot Power MultiMoto
Some specs of the MultiMoto (seen in Figure 1):
- 6.0V-36V battery voltage
- Four independently controlled channels
- 6.5A continuous current on each channel (8A max)
- Nearly blow proof
Wow, great! Our actuators have a limit of 6.5A as well. We need to give 12V to each actuator, so that's covered here too.
But sometimes things are too good to be true.. We tried it out and something went wrong. I wasn't actually there for this, but the four actuators were all moving ok, one of the wires came out (or something like that), and it was powered down. Somehow the Arduino was fried. The MultiMoto doesn't seem to be functioning either. So we are in process of replacing the MultiMoto.
In the meantime, I am trying to find something a bit cheaper to buy so I can at least power two of the actuators. If I can get the machine working in one axis, it would be easy enough to replicate in a second axis.
The requirements for my personal motor shield purchase are:
- Able to handle 12V
- Power two motors
- Able to handle at least 3A per channel

Figure 2 - Arduino Motor Shield R3
I found these handy dandy instructions to help set up an Arduino Motor Shield R3 (as seen in Figure 2) (http://www.instructables.com/id/Arduino-Motor-Shield-Tutorial/?ALLSTEPS).
It appears that this shield is really only able to handle 2A per channel (for two motors), or 4A for a single channel. Hmmm. Will that be enough? I guess if anything, I can control on actuator. It will set me back about $25 (amazon link).
Figure 3 - Pololu Motor Driver shield
But I shouldn't settle for less than what I need. Figure 3 shows another shield I found. It's the Pololu MC33926 dual motor driver shield for Arduino. Again, it'll set me back $36. But it seems to have the specs that I'm looking for as a short term replacement. 5V-28V operating voltage. 3A continuous output current per motor (5A peak). It would just require a little bit of soldering, which I'm sure I could do. Pololu motor shield manual
I feel like I should spend an extra $11 to be able to power two actuators sufficiently instead of just one. If this ends up working well and the replacement MultiMoto still proves problematic, we could incorporate two of the Pololu's.
You may have noticed I've posted links to Amazon Prime sources. This is because I have Prime for a month and I'm trying to take advantage of it! If I can get these parts in a day, it would really help me have some more time for finishing it up too. I don't really want to deal with long shipping times. I have work to do.
Specs: Linear actuators
The linear actuators that we are using are the PA-16 linear actuator by Progressive Automations.
Link to spec sheet:
https://www.progressiveautomations.com/media/catalog/pdf/Medium_Mini_Actuator_PA-16.pdf



Link to spec sheet:
https://www.progressiveautomations.com/media/catalog/pdf/Medium_Mini_Actuator_PA-16.pdf

Figure 1 - PA-16 linear actuator
What a beautiful actuator, huh? We have a way to link the actuator to the frame already, so that shouldn't be an issue. Our particular actuators have a stroke length of 4".
Input voltage: 12VDC
Load capacity: 330 lbf

Figure 2 - Current vs. Load
I already mentioned that it has a load capacity of 330 lbf, but that is dependent on the amount of current we supply to the actuator. I'll have to check on how much force we'll actually need to apply in each axis... If we need less than 100 lbf, then we could be safe with supplying 3A of current to each actuator. I need to figure that out. I'm looking to save some money in regards to the Arduino motor shield.

Figure 3 - Speed vs. Load
Figure 3 shows the speed of the actuator versus the load. As the load increases, the actuator slows down. But it looks like the speed goes down by a very tiny amount. If we get loads up to 100 pounds, then the speed will have slowed from 0.20 in/s down to maybe 0.19 in/s, which may or may not affect anything. We are looking to control the speed of the actuators using PWM from the Arduino anyway. It may be noted, though, that the max speed we expect to reach per actuator is 0.2 in/s. Combining two of them moving in opposite directions, the maximum change in grip to grip distance will be 0.4 in/s. Now that I think about it, that is quite a bit!
So of course PWM will need to be utilized. Since the speed seems to be fairly consistent throughout the load, I am anticipating that we will not need to use feedback control. That is a good thing because we don't actually have any sort of encoder or anything in the actuators to begin with. Let's just hope we don't need to do that...
In general, the actuators give us the following specs to be followed by the other components:
Input voltage: 12VDC
Input current: 4A-24A (for 4 actuators), 2A-12A (for 2 actuators).
Max speed: 0.4 in/s (0.2 in/s/actuator).
Wednesday, February 8, 2017
ToDo: Bulge test machine
So another aspect of my thesis will include the use of something called a "bulge test." Essentially, a test specimen is clamped down and then pressure is applied evenly across some area. The ideal way to do it would be to use air pressure. Is that actually the ideal way? Let's just say that it is. Hydraulic pressure is another way.


Figure 1 - Bulge test
(http://www.intechopen.com/source/html/38394/media/image2.png)
A test fixture obviously needs to be designed and constructed so we can actually run through the tests. Will air be enough? Is some sort of liquid more necessary? If air is to be used, I have some SolidWorks parts already made up, but the generation of the pressure needed is still a problem.
How much pressure is actually needed?
ToDo:
- Figure out how much pressure we need to generate
- Come up with the necessary drawings
- Figure out how to best protect the camera
Boom. I have a bunch of work ahead of me. In addition to figuring out all of the design needs and constraints, I need to figure out what we have in the lab already and what we need to purchase. Reading about how the testing helps determine forming limit curves will help as well. Even though I'm only taking one other class right now, my plate may be considered full with a bunch of work left to do and a bunch of information left to absorb.
ToDo: Biaxial tensile test machine
So the biaxial tensile test machine must be built before I can use it. A couple of us are working on it at the moment.
What must it look like?

What must it look like?
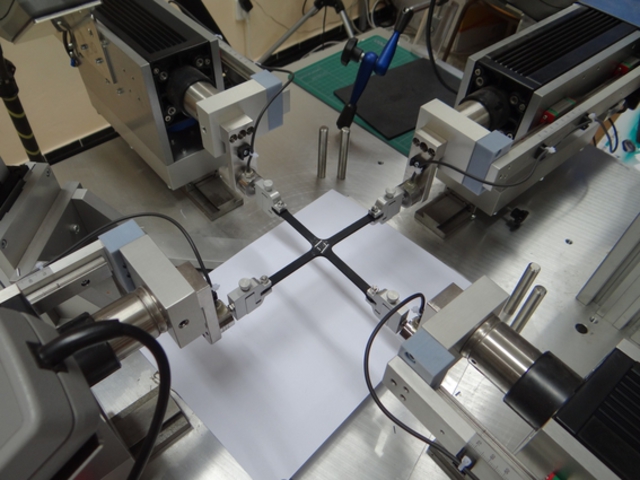
Figure 1 - A biaxial tensile test machine
(http://www.biomechanika.cz/pictures/494.jpeg)
It has to look something like that thing I posted above in Figure 1. Of course our design will be significantly different. We do not have a bunch of money to work with. If anything, we have almost no money to work with. Luckily the other student was able to buy many of the necessary parts beforehand with some funding he had acquired.
What do we have?
We have a frame made out of aluminum extrusion, four linear actuators (which may or may not all be operational), an arduino, two load cells, and a whole lot of frustration. Just kidding about that last part.
The frame is good to go. The connections between the linear actuators, load cells, and grips are pretty much good to go (for now). We'll see how they do when everything is actually together. The camera is operational.
The next step is to achieve controlled movement out of the actuators. We have been on this step for a little while now. What we were doing was using a Robot Power MultiMoto shield on the Arduino and were trying to power the actuators with that. According to the specs, that should totally get the job done. But when powering the combination of actuators, shield, and arduino, something went wrong. I wasn't personally there, but the arduino was fried. The motor shield also seems to have been fried because it wouldn't do anything when I tried using it with my own Arduino Uno (which is still perfectly operational).
After that, I tried getting the actuators just to work with any power supply. Three out of four at least moved slowly when I attached them (individually) to a 9 V, 1 A power supply. The actuators call for 12 V and from 1 A up to 6 A of current. The fourth one didn't really do anything. I took it up to the electrical engineering department so someone more knowledgeable could help me out. Apparently the actuator had some less amount of resistance through its wiring. I'm not sure why that is. According to Ohm's law, though, having less resistance throughout the actuator would result in a larger current running through the motor when supplied 12 V. So I attached it to my car battery for a second and got it moving. Was that smart? I don't know. It moved though, and was not pushed past its current and voltage limits (according to my math).
Will the differences in internal resistance cause some sort of problem? Will I need to incorporate some sort of feedback control? Hmmmm. That could pose problematic, as I have very limited experience with that.
So where are we at? The MultiMoto is being returned to the company with a new one on the way. In the meantime, I need to get two of the actuators working and controlled. I want to see some tensile test action. I also need to power these.
ToDo:
- Find or buy appropriate power supply
- Buy a motor shield to power two of the actuators
- Determine whether or not we actually need feedback control
- Drink coffee
In addition to that, I need to help get the load cells working. The load cell does not supply a significant enough voltage to be read by the DAQ. Therefore, we wish to use an op-amp (operational amplifier) to amplify our signal enough to be read. Apparently I had already been introduced to this in some class in the past, as I remembered a few things about it. But nah, I'm pretty clueless still.
Which op-amp should we use? How do we wire everything? I need to make these schematics and decisions. I gotta get this stuff workinggggg.
ToDo:
- Determine how much amplification we need.
- Buy appropriate op-amps, resistors, and other electrical components.
At the end of this, I am hoping to be reimbursed as well. There's really no telling what will happen. I guess if I land a decent job after all this, losing a hundred bucks won't be such a big deal at all. I'm sure it'll all be good in the end.
Introduction
I guess I'm starting this blog so I can get myself motivated to work on my Master's thesis. I am a student studying mechanical engineering at NIU, and I wish to graduate by August of 2017. Of course all of the required classes must be passed, but I'm not worried about those. My real worry comes into play with the thesis that I must come up with, execute, and successfully defend.
Why would I be worried about the open ended problem? The open ended problem allows for creativity and flexibility in completion. Personally, though, I have been able to thrive off of closed ended problems. "Give x and y, find z." The deadlines associated with those types of assignments obviously get me kicked into gear, too. So in order to finish this thesis, I need to do three things, basically:
- Figure out what I am given and what I want to find.
- Make deadlines for myself to follow. If I go off of "August 2017" for a deadline, I'll be screwed.
- Actually put in all of the work.
So that shouldn't be so hard, right? I have a general idea. Actually sitting down and doing the work is where I need to better myself. And I totally can do it. I am using this platform to try to create further motivation.
I will also try to keep everything organized through these posts. Is that possible? It might become a bit cluttered, but I'll try my best.
Subscribe to:
Comments (Atom)